2018. 07. 04. - 09:30
Közelebb a segítség: jobban fognak a robotok

Egyre pontosabban és precízebben ragadnak meg tárgyakat a robotok – a Queenslandi Műszaki Egyetem kutatói azon dolgoznak, hogy ezt különféle környezetben is jól kivitelezzék a mesterséges intelligencia által működtetett gépek.
Minél pontosabbak, annál többet tudnak segíteni bizonyos feladatok elvégzésében - a Queenslandi Műszaki Egyetem robotikával foglalkozó kutatói azon dolgoznak, hogy a robotok gyorsabban és pontosabban tudjanak fogni, beleértve azt a helyzetet is, ha változik a környezet vagy zsúfoltság van körülöttük. Ha ugyanis precízebbek, hasznosabbak is, jobban lehet őket alkalmazni az iparban és a háztartásban is.
Az új megközelítés lehetővé teszi a robot számára, hogy gyorsan felmérje a környezetet, minden pixelt elemezve. A dinamikus fogás tekintetében a valóságban történt tesztelés során 88 százalékos pontosságot ért el, a statikus kísérletek során pedig 92 százalékot.
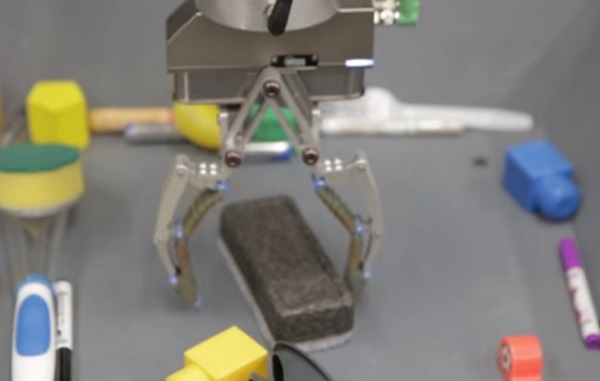
A robot számára igen bonyolult feladat felvenni egy adott tárgyat
A megközelítés a QUT generatív fogáskonvolúciós neurális hálózatán alapul, dr. Jürgen Leitner munkáját dícséri, aki elmondta: miközben a fogás és a tárgyak felemelése alapvető emberi feladat, a gépek számára ez hihetetlenül bonyolult lehet.
„Képesek vagyunk programozni a robotokat, rendkívüli módon ellenőrzött környezetben, arra, hogy felvegyenek bizonyos tárgyakat. Ugyanakkor a jelenlegi megfogási technika nagy hiányossága, hogy kifog rajta a változáshoz való alkalmazkodás képtelensége – ilyen az is, ha a tárgy elkezd mozogni” – mondta el dr. Leitner.
A világ nem megjósolható, a dolgok változnak, mozognak, keverednek, s ez előzetes figyelmeztetés nélkül történik. Ezért a robotoknak is szükséges alkalmazkodniuk, hogy strukturálatlan környezetben is hatékonyak legyenek – tette hozzá a szakember.
A PhD-kutató Douglas Morrison, valamint dr. Leitner és Peter Corke a QUT tudományos és mérnöki karáról fejlesztették ki az új módszert, aminek neve: valós idejű, objektumfüggetlen fogási szintézis, hurokszerű (zárt markú) megragadáshoz.
A fejlesztéssel a robot gyorsabban dönt és hatékonyabban fog
A generatív fogáskonvolúciós neurális hálózat úgy működik, hogy a kétujjas fogás minőségét és a pózt is előre jósolja, pixelről-pixelre. A robot felméri, mi van előtte, de már nem kell mintát készítenie számos fogási technikáról, mielőtt döntést hoz, ezzel sok időt takarítva meg.
Ezzel a módszerrel a fogás sikere 83 százalékos lett a valós világban történő tesztelés során, sőt, a korábban nem látott tárgyak megragadása is 88 százalékos pontossággal történt. Egy rendetlen, dinamikus környezetben szintén sikerült elérni 81 százalékos precizitást.
Dr. Leitner szerint megközelítésük a jelenlegi mélytanulási technikák számos korlátját legyőzte – a módszer segítségével a robot körülbelül 20 milliszekundumon belül megnézi az előtte levő képeket, s ezzel lehetővé válik, hogy felülvizsgálja döntését, hol és hogyan ragadjon meg egy tárgyat, s így már „vakon” is meg tudja ezt tenni. Mindez különösen a rendetlen környezetben fontos.
A fejlesztés igen értékes lehet az automatizáció és a háztartási feladatok terén – tette hozzá a szakember.
László Adrienn








