2020. 06. 06. - 09:45
Mesterséges intelligencia: rugalmas talp készül a robotok gyorsításához
Kutatók olyan rugalmas robottalpat fejlesztettek, amely negyven százalékkal gyorsabban képes járni egyenetlen talajon is, mint az elődei.
Egyre tökéletesebbek lehetnek a robotok. A San Diego-i Kaliforniai Egyetem robotikusai kifejlesztették a rugalmas robotlábat, mely immár 40 százalékkal gyorsabban képes járni akár egyenetlen talajon is elődeihez képest – faforgácson és kavicson is.
A kutatók munkája igen jó alkalmazási lehetőségeket kínál, az ilyen lábbal rendelkező robotok ugyanis mentési és keresési munkálatokhoz, valamint űrkutatásban is használhatók. Olvass az eddigi leggyorsabb, gepárd ihlette robotokról!
„A robotoknak képesnek kell lenniük gyorsan és hatékonyan járni, természetes, egyenetlen talajon is, így hát bárhova mehetnek, ahová ember is el tud jutni” - mondta Emily Lathrop, a San Diego-i Kaliforniai Egyetem Jacobs Műszaki Iskolájának PhD hallgatója, a tanulmány első szerzője.

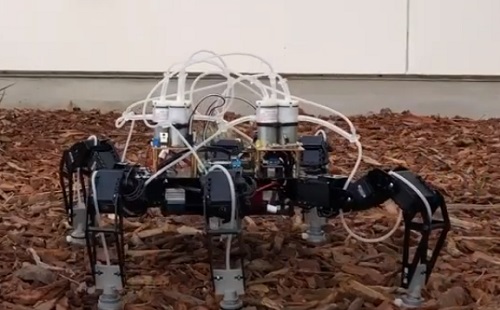
A rugalmas robotláb lehetővé teszi az egyenetlen talajon járást
A kutatók tanulmányukat a május 15. és július 15. között zajló RoboSoft konferencián mutatják be.
„A robotok általában csak meghatározott ízületeknél tudják irányítani a mozgásukat - mondta Michael T. Tolley, a San Diego-i Kaliforniai Egyetem Mechanikai és Repülési Műszaki Tanszékének professzora, a tanulmány vezető szerzője. – Jelenlegi munkánkban megmutattuk, hogy egy robot, mely képes ellenőrizni lába merevségét és alakját, felülmúlja a hagyományos mintákat, s képes számos terepen alkalmazkodni.”
A robotlábakat hajlékony gömbökből készítették, amelyek kávédarával töltött latex membránból vannak. A természet ihlette struktúrák nem először segítik egyébként a kutatókat. Olvasd el: Kicsi, de teljesítményében óriási a csótány ihlette robot
Az új talpak elősegítik a robotok gyorsabb járását és fogását is – a szemcsés megoldás miatt, amely középutat jelent a szilárd és a folyékony anyag között.
Amikor a talp a talajhoz ér, megszilárdulnak, megfelelve ezzel a talajnak és szilárd alapot nyújtanak. A lépések során azonban váltanak – s a tartószerkezetek elősegítik a rugalmas lábak merevségét, ha elakadásra van szükség.
Ez egyébként az első alkalom, hogy a robotlábakat olyan egyenetlen terepen tesztelték, mint a kavics és a faforgács.
A lábakat egy kereskedelemben is kapható, ún. hexapod robotra telepítették. A kutatók fedélzeti rendszert terveztek és építettek, mely negatív nyomást generálhat a lábak elakadásának megakadályozására és pozitív nyomást a lábak egyes lépések közötti elválasztására.
Ennek hatására a lábakat aktívan akadályozni lehet vákuumszivattyúval, amely eltávolítja a levegőt a kávéőrlemények közül és megkeményíti a lábat. A talpak passzív módon is elakadhatnak, amikor a robot súlya kiszorítja a levegőt a belsejében található kávéőrlemények közül – és ez megszilárdulást, merevülést eredményez.
A kutatók tesztelték a robot járását sík talajon, faforgácson és kavicson, a robotlábbal és anélkül. Mind kiderült, a passzív lábak a legjobbak sík terepen, míg a laza talajon a rugalmas talpak bizonyítottak. Ezek abban is segítenek, hogy a robot lábai jobban tapadjanak a talajhoz, növelve a sebességét.
A javulások különösen figyelemreméltóak voltak, amikor a robotnak lejtős, egyenetlen terepen kellett járnia.
„A természetben számos olyan talaj van, amely a robotok számára kihívást jelent. Ilyen a csúszós, a sziklás és a vizenyős terep is - ezek mind bonyolulttá teszik a járást” – fejtette ki Nick Gravish, a San Diego-i Kaliforniai Egyetem Gépészeti és Repüléstechnikai Tanszékének professzora, a tanulmány társszerzője.
Hozzátette: a bármilyen típusú talajhoz alkalmazkodó lábak segíthetnek a robotoknak a mobilitás javításában.
Következő lépésben a kutatók lágy érzékelőket építenek a láb aljára, hogy az elektronikus vezérlőpanel lehetővé tegye annak felismerését, milyen talajra lép a robot, s a talpak gátlásánál aktív vagy passzív módot kell alkalmazni.
László Adrienn